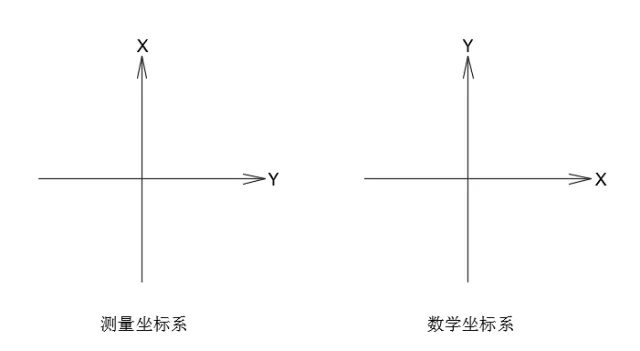
在工程测量工作中,有一个极易被新手忽略的关键问题:工程测量坐标系与我们中学所学的数学坐标系,不仅定义存在差异,对应的计算方法也有所不同。两者在定义上的区别,可参考相关图示(本文暂略,实际应用中可结合专业图纸对照)。
很多人会疑惑,为何要这样定义两种坐标系?其实目前没有明确的统一解释,更多是行业内长期形成的约定俗成。除非后续有行业标准的调整,否则在实际工作中,我们仍需严格遵循这一既定规则,避免因坐标系混淆导致测量误差。
这个看似简单的定义差异,却很容易“踩坑”。如果直接将工程测量坐标导入CAD软件绘制,会发现图形的左右方向与实际现场完全相反。因此,实际操作中,我们通常会将测量坐标的x、y轴数值互换后再进行绘图,这样绘制出的图形才能与现场实际情况完全吻合,保障后续施工的准确性。
01 坐标方位角:工程测量的“方向密码”
在工程测量中,仅仅掌握点的坐标(x,y)远远不够,若不了解坐标方位角,只能算是入门级水平,无法开展复杂的测量工作。坐标方位角是描述方向的核心参数,理解它是做好坐标计算的基础。
简单来说,坐标方位角特指某一特定方向的角度值,其计算逻辑是:将坐标系的原点平移至该方向的起点,以坐标零方向(工程测量中通常为x轴正方向)为基准,顺时针旋转至目标方向,旋转过程中所经过的角度,就是该方向的坐标方位角。
若仍觉得抽象,可结合实例理解:想象一条线段,将工程测量坐标系的原点与线段的一个端点重合,从x轴正方向开始,想象有一条无形的线顺时针旋转,直到与这条线段完全重合,这个旋转角度,就是线段起点(与原点重合的端点)到线段另一端点的坐标方位角。
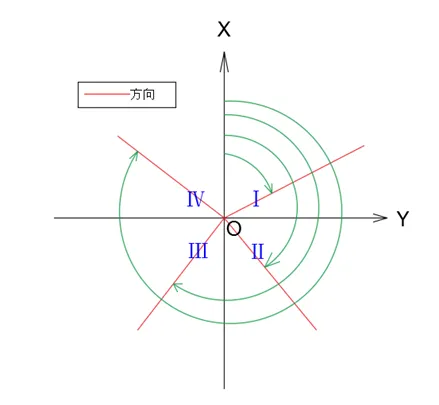
坐标方位角的取值范围是0°~360°,需要注意的是,通常不会出现360°的方位角,因为当角度达到360°时,会直接记为0°,两者本质上表示同一个方向。
此外,坐标方位角有一个非常实用的简便计算特征,在坐标推算中经常用到:A点到B点的方位角,等于B点到A点的方位角加上180°。掌握这个规律,能大幅提高坐标计算的效率。
结合工程测量的实际需求,我们重点需要掌握以下三种核心坐标计算方法,覆盖绝大多数现场测量场景。
02 坐标正算:已知条件求目标坐标
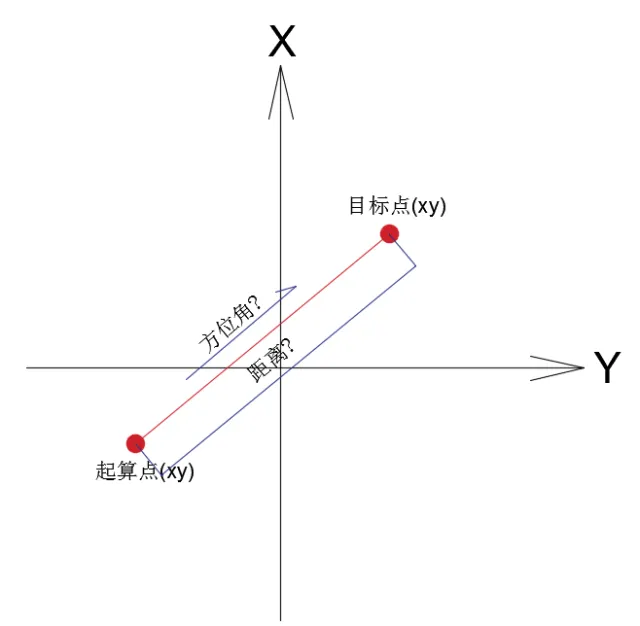
坐标正算,是工程测量中最基础、最常用的计算方法,核心逻辑是:已知一个起算点的准确坐标,以及该起算点到目标点的距离和方位角,通过固定公式计算出目标点的坐标。结合图示(实际应用中可对照现场测量图)理解,会更加直观。
坐标正算的公式简洁易懂,具体如下:
X = x + s×cosF
Y = y + s×sinF
公式中各参数含义:X、Y为待求目标点的x、y坐标;x、y为已知起算点的x、y坐标;s为已知起算点到待求目标点的直线距离;F为已知起算点到待求目标点的坐标方位角。
03 坐标反算:已知坐标求距离与方位角
坐标反算可以看作是坐标正算的逆运算,其核心需求是:已知起算点和目标点的坐标,反向计算出两点之间的直线距离,以及起算点到目标点的坐标方位角。同样,结合图示能更清晰地理解计算逻辑。
其中,两点之间距离的计算相对简单,公式如下:
s = sqrt((x1 - x2)² + (y1 - y2)²)
公式中,sqrt表示开算术平方根,^表示乘方运算;x1、y1为起算点坐标,x2、y2为目标点坐标。
相比之下,方位角的计算稍显复杂,但掌握逻辑后也能快速上手。首先计算一个基础角度值:F = atan((y2 - y1)/(x2 - x1)),若计算出的F值为负数,只需加上360°即可转化为正数;随后进行判断:若x2 < x1(即目标点在起算点的左侧),则在当前F值的基础上加上180°,否则保持F值不变。公式中,atan表示反正切运算。
这里需要特别注意一种特殊情况:若x2 = x1(即两点在同一条竖直线上),上述基础公式无法直接使用,此时方位角F直接取90°,后续的判断逻辑与上述一致。
04 坐标变换:跨坐标系的坐标转换技巧
坐标变换是工程测量中相对复杂的知识点,需要用到高中阶段的数学知识,若具备高中及以上学历,理解起来会更加轻松。坐标变换的核心作用,是将一个坐标系中的坐标,转换到另一个坐标系中,这在大型工程、跨区域测量中经常用到,合理运用能大幅提升测量效率,带来意想不到的便利。
坐标变换的核心公式源于初等数学中的坐标系旋转和平移原理,应用到工程测量中后,只是增加了部分测量专业概念,简单应用场景下,与初等数学中的计算逻辑完全一致,具体公式如下:
x2 = x1cosα + y1sinα + A
y2 = y1cosα - x1sinα + B
公式中各参数含义:x1、y1为原坐标系(第一个坐标系)中的点坐标;x2、y2为转换后坐标系(第二个坐标系)中的点坐标;α为两个坐标系之间的旋转角;A、B为两个坐标系原点之间的平移值(即原坐标系原点在新坐标系中的坐标)。
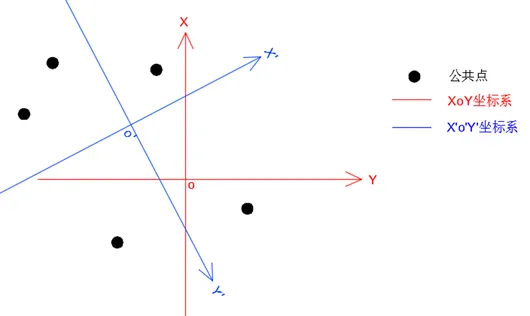
在实际工程测量工作中,我们很少能直接获取到旋转角α和平移值A、B,因此直接套用上述公式计算会非常困难。此时,我们可以利用“公共点”来求解旋转角和平移值,进而完成其他未知点的坐标转换。
所谓公共点,就是同时拥有两个坐标系坐标的点,这类点在实际工作中很容易获取,可通过现场测量、图纸查询等方式得到。下面我们以两个公共点为例,推导具体的转换公式,满足日常工地的实际应用需求。
假定A坐标系中有两个公共点,坐标分别为(x1,y1)和(x2,y2),这两个点在B坐标系中对应的坐标分别为(x11,y11)和(x21,y21),具体推导步骤如下:
第一步:定义中间参数
令 a = x21 - x11 ;b = y21 - y11 ;c = x2 - x1 ;d = y2 - y1
第二步:判断转换有效性
若 c² + d² = 0,说明两个公共点在A坐标系中重合,无法进行坐标转换,此时转换无效;若c² + d² ≠ 0,则可继续进行后续计算。
第三步:计算关键参数
令 u = (a×c + b×d) / (c² + d²)
令 v = (a×d - b×c) / (c² + d²)
令 w = x11 - x1×u - y1×v ;z = y11 + x1×v - y1×u
第四步:未知点坐标转换
若已知A坐标系中某未知点的坐标为(yizhix,yizhiy),则该点在B坐标系中的坐标(x,y)可通过以下公式计算:
x = yizhix×u + yizhiy×v + w
y = (-1)×yizhix×v + yizhiy×u + z
看似复杂的推导,实际掌握后非常简单,上述方法完全能满足日常工地的坐标变换需求,无需复杂的专业软件,手动计算即可完成。


评论0